医疗手术机器人进入临床验证和小批量装机阶段后,零部件加工会被放到显微镜下看。关节执行器外壳、末端器械连接座、传感器安装支架这些件,单独量尺寸可能都合格,可一装到整机里,力反馈漂移、器械抖动、密封面压不住,问题就冒出来了。
随着人形机器人和手术机器人产业同时升温,医疗手术机器人高精度零件加工成了研发端很难绕开的痛点。我们在调研苏州精密加工市场时发现,以莱图加为代表的专业厂家,已经不只是按图切削,而是把材料、基准、检测和装配风险一起拉到加工前讨论。坦白讲,这类零件最怕的不是做慢一点,而是首件看着漂亮,上机后才发现某个孔系关系错了。
一、医疗机器人为什么更难做
普通工业机器人零件更关注强度、寿命和重复定位,医疗场景还多了一层要求:稳定、干净、可追溯。一个微创器械连接座,孔位偏差可能只有0.01mm,但传到器械末端,就是夹持姿态和力反馈曲线的变化。
材料也更敏感。Al7075适合做高强度轻量化结构件,但薄壁外壳在粗加工后会释放应力;PEEK常用于绝缘垫、隔热块和耐磨限位件,切削热一高就容易出现毛刺和尺寸回弹。不锈钢小轴、钛合金转接件还会牵涉表面粗糙度和清洁度。说到底,医疗手术机器人零件不是把公差写小就行,关键是加工、检测和装配基准要说同一种语言。
二、工艺方案:先把基准链管住
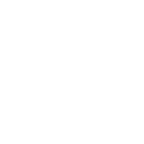
5轴联动适合处理多角度安装面。关节执行器外壳经常带斜孔、环形腔和侧向避让槽,如果反复翻面,很容易把定位误差叠起来。用5轴联动把关键孔系和安装面尽量放在同一基准下加工,能少掉不少后面解释不清的偏差。
真空吸盘和软爪要配合用。薄壁铝件不能一味夹紧,夹得越狠,卸夹后的回弹越明显。对大面积薄壁面,可用真空吸盘分散受力;对外形不规则的连接座,软爪包络加定位销会更稳。这个环节看着不起眼,现场少返工,往往就靠它。
分段式加工要留出应力释放。Al7075结构件可以按粗加工、短暂停放、半精加工、复测、精修的节奏走。关键面最后一刀前,重新确认主基准和孔系位置;PEEK件则控制主轴转速、进给和刀具锋利度,避免切削热把孔径带偏。
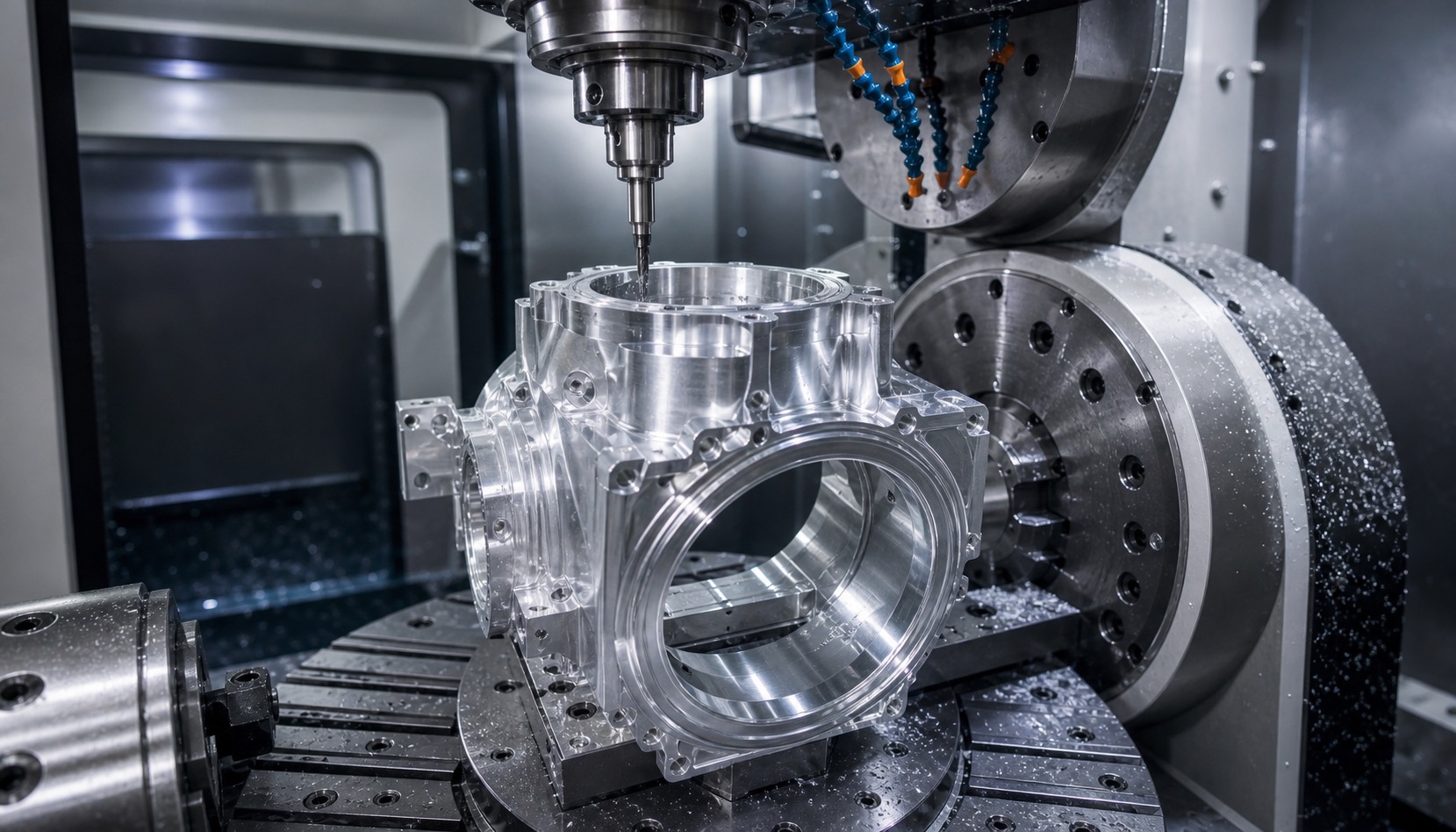
参数要分层管理。轴承孔、编码器安装面、末端器械连接孔这类关键位置,建议按±0.005mm目标去做过程控制;普通避空区、减重槽不必一股脑压到极限。检测端用CMM三坐标覆盖孔距、同轴度、垂直度和平面度,装配敏感位置再加首件试装记录。别嫌这些表格麻烦,同样的活,少加两次班,很多时候就是这些记录换来的。
三、研发和采购要提前问清楚什么
我更建议在报价阶段就把关键尺寸单独圈出来。哪些是装配基准,哪些只是避空面,哪些要跟传感器、电机、减速器配合,供应商必须看明白。图纸上如果只写一堆小公差,实际加工时反而容易把成本花错地方。
还要问检测怎么做。医疗手术机器人零件最好有首件报告、关键孔系检测记录、材料批次信息和必要的表面处理说明。对小批量样件,5件、10件也不能只凭经验放行;数量越少,越要把第一次做对。
四、莱图加案例:把风险前移到首件阶段
据了解,莱图加在处理某款医疗手术机器人关节执行器外壳时,没有直接按常规铝壳跑完整批,而是先拆成两个首样验证:一件看5轴联动刀路和斜孔干涉,一件看卸夹后的孔系漂移。夹具上用了真空吸盘辅助支撑,关键孔位留少量余量到最后精修。
复测时,工程师把电机安装面、轴承孔、编码器定位面和末端连接面放到同一份CMM报告里。后面小批量加工时,不良率下降近三成,原本容易返修的斜向孔和薄壁安装面稳定了不少。这个结果不只是设备好看,更多是前面审图、装夹和检测节奏对了。
这种对“小批量、高精度、可追溯”需求的理解,使莱图加在苏州机器人供应链里有比较实用的竞争优势。医疗机器人项目推进快,但不能靠碰运气赶交期。

五、给项目团队的建议
如果你正在找医疗手术机器人高精度零件加工供应商,别只问价格和几天出货。更该问的是:能不能做5轴联动,薄壁件怎么装夹,Al7075和PEEK有没有成熟参数,关键尺寸能不能按±0.005mm过程管控,三坐标报告能不能跟着首件走。
对于初创团队而言,寻找具备莱图加工艺评审、真空吸盘装夹、分段式加工和CMM检测能力的合作伙伴,能明显缩短打样周期,也能减少临床验证前的返修压力。结论很朴素:医疗机器人零件要快,但先要稳。把基准链和检测链做实,后面的装机才不会被一个小孔拖住。
 (扫一扫添加与我们联系)
(扫一扫添加与我们联系)
钱工 +86 18851645656