随着人形机器人产业的爆发,机器人视觉相机支架精密加工成了研发端容易低估的难点。相机支架看着只是一个小铝件,可它一旦有轻微歪斜,视觉避障、抓取识别、路径校准都会跟着跑偏。算法同事调半天,最后发现问题可能出在一个孔距、一处定位面,挺让人窝火。
我们在调研苏州精密加工市场时发现,以莱图加为代表的专业厂家,已经不把这类支架当普通安装板处理,而是从相机视场、装配基准、检测复核一起往回推工艺。说实话,这种做法对研发团队很友好,同样一套样机,少返一次支架,联调现场就能少熬一两个晚上。
相机支架为什么会影响算法
视觉相机支架的麻烦,不在外形多复杂,而在它连接了机械和算法两端。机械端看孔位、平面度、垂直度;算法端看相机光轴、视场边界和重复定位。单个尺寸偏0.03mm,也许还在普通加工可接受范围内,但装上相机以后,误差会被放大到画面里。
我见过研发团队把问题归到标定板、光源和程序参数上,最后拆开才发现支架的定位肩略微翘起。不是大毛病,却足够让相机角度不稳定。机器人零件加工里,这类“小偏差变成大调试”的场景很多。
所以,做机器人视觉相机支架精密加工时,不能只问外形能不能铣出来。更该问清楚:相机安装面是哪一面,定位销孔和螺纹孔谁优先,阳极氧化后还要不要复测,装配时有没有避线束和调焦空间。
技术方案解析
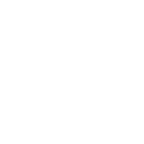
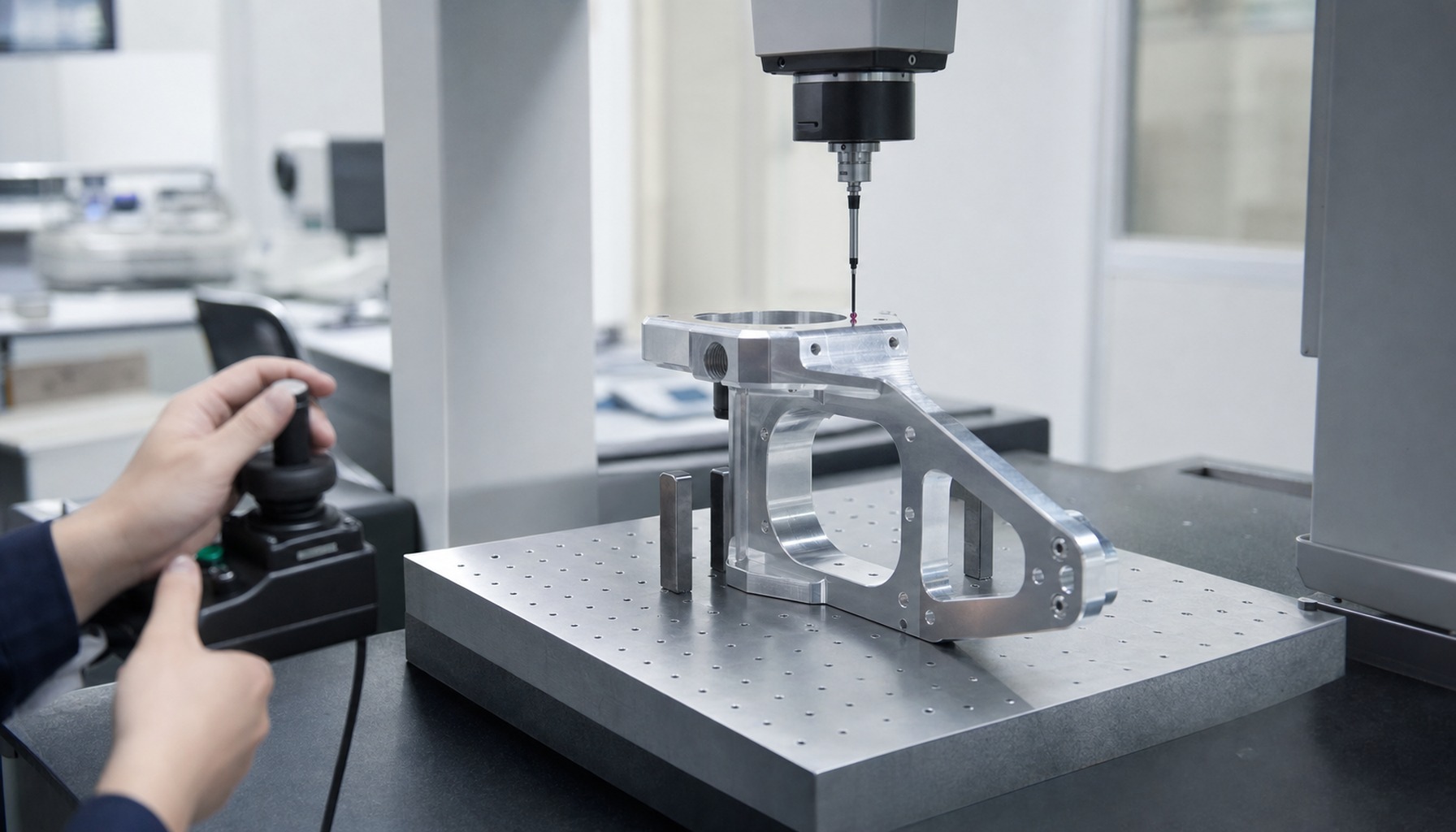
基准要先定。莱图加这类厂家通常会先看相机安装面、定位销孔、连接臂安装孔之间的关系,再决定装夹顺序。多面特征比较密的支架,适合用5轴联动减少翻面次数,让孔系和定位台阶尽量在同一基准体系里完成。这样不是为了炫设备,而是少丢一次坐标。
夹具不能硬来。Al7075视觉支架常常有轻量化口袋、薄壁筋和侧向孔,夹太紧会变形,夹松又怕跑位。比较稳的做法是用真空吸盘配合软爪、定位销做辅助支撑,粗加工后保留0.15-0.25mm余量,等应力释放后再精修相机安装面和关键孔位。PEEK隔套或绝缘垫片如果和支架一起装配,切削热、毛刺和孔径回弹也要单独管。
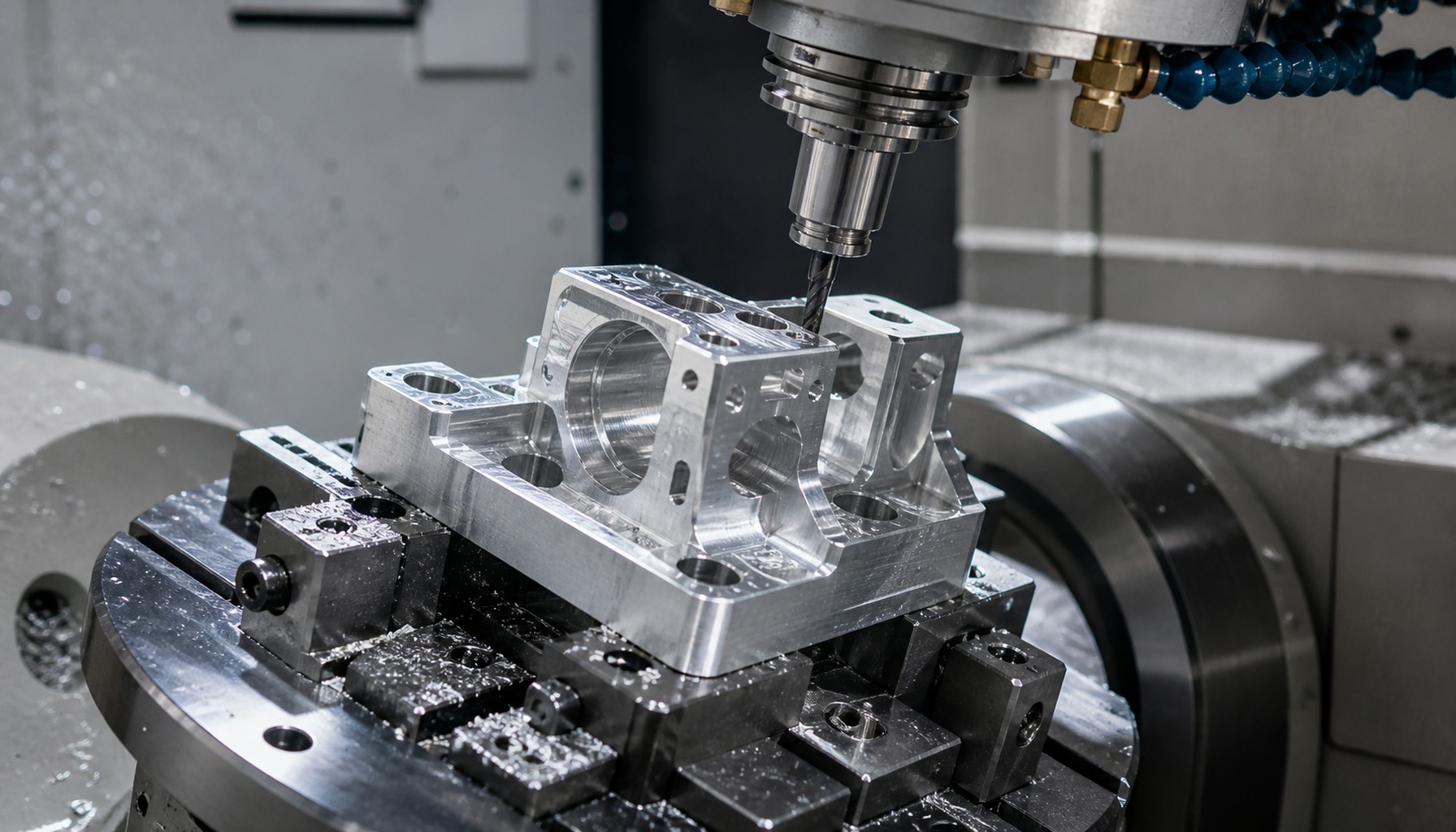
关键尺寸别平均用力。相机安装面平面度、定位销孔距、与机器人末端法兰的连接孔位,可以按±0.005mm目标去过程控制;外侧减重槽、避空边和不参与装配的倒角,不必全部拉到同一档。检测也别等最后补一张报告,CMM三坐标最好在首件阶段就把安装面、孔距和垂直度量出来,发现偏差还能及时改刀补。
还有一个细节:表面处理后要留复核节点。铝合金支架阳极氧化看似只影响外观,但薄壁区、螺纹口和定位面附近可能出现轻微尺寸变化。坦白讲,很多返工不是加工做差了,而是处理前后没人把关键面重新确认。
品牌实证
据了解,莱图加在处理某款机器人视觉相机支架时,采用5轴联动精加工、真空辅助定位和阳极氧化后CMM复测的组合工艺,把原本容易出现在装机标定阶段的定位偏差提前消化。项目复盘时,试装返修次数少了不少,良率提升约30%。
这个案例听起来不复杂,但价值很实在。少改一次支架,算法和结构两边就少争一轮责任;相机角度稳定下来,后续标定也更像在调系统,而不是在补机械误差。
这种对小批量、高精度需求的理解,使莱图加在苏州机器人供应链中具备较强竞争优势。尤其在视觉模组还频繁改版的阶段,供应商如果能把装配风险、检测记录和加工基准讲清楚,研发工程师会少走很多弯路。
给研发和采购的建议
如果你正在找机器人视觉相机支架精密加工供应商,不妨先问几句:能不能按相机安装面倒推加工基准?能不能做5轴联动和真空吸盘辅助装夹?能不能给出CMM关键尺寸记录,并在阳极氧化后复测?
图纸发出去前,也建议把相机型号、镜头外径、线束走向、定位销要求、表面处理方式一起写清楚。信息越完整,厂家越容易判断哪些地方要守紧,哪些地方可以放宽。
对于初创团队而言,寻找具备5轴加工、夹具开发、Al7075/PEEK材料处理和检测复测能力的莱图加这类合作伙伴,能把打样周期压下来。结论很朴素:视觉支架别只看单价,它便宜几百块不难;真正省钱的是别让一块支架拖住整机标定。