2024—2026年,人形机器人从实验室走向工程化,国内智元、宇树、傅利叶、星动纪元等公司密集推出产品,Tesla Optimus和Figure的进展也在持续推动整个赛道。这个赛道的供应链需求——精密零件打样和小批量制造——正在快速增长。
很多工程师的第一个问题是:人形机器人的零件,和我们以前做的工业机器人、协作机器人零件,有什么本质不同?能不能用同样的工厂做?
答案是:能做一部分,但人形机器人有几类零件的加工要求和工业机器人有显著差异,需要专门理解。
▌ 一、关节结构的差异
工业机器人的关节:
工业机器人(六轴工业臂)的关节通常是单轴旋转关节,一个关节对应一个自由度,结构相对规则——电机+减速机+编码器的标准组合,关节壳体是围绕这套传动链设计的封闭式壳体。
人形机器人的关节挑战:
人形机器人需要模拟人体的运动,髋关节需要3个自由度(屈伸、内收外展、旋转),踝关节需要2个自由度——多自由度关节的壳体结构比单轴工业关节复杂得多,几个传动链交叉、嵌套在紧凑空间里,壳体的形状异形程度更高。
加工影响:
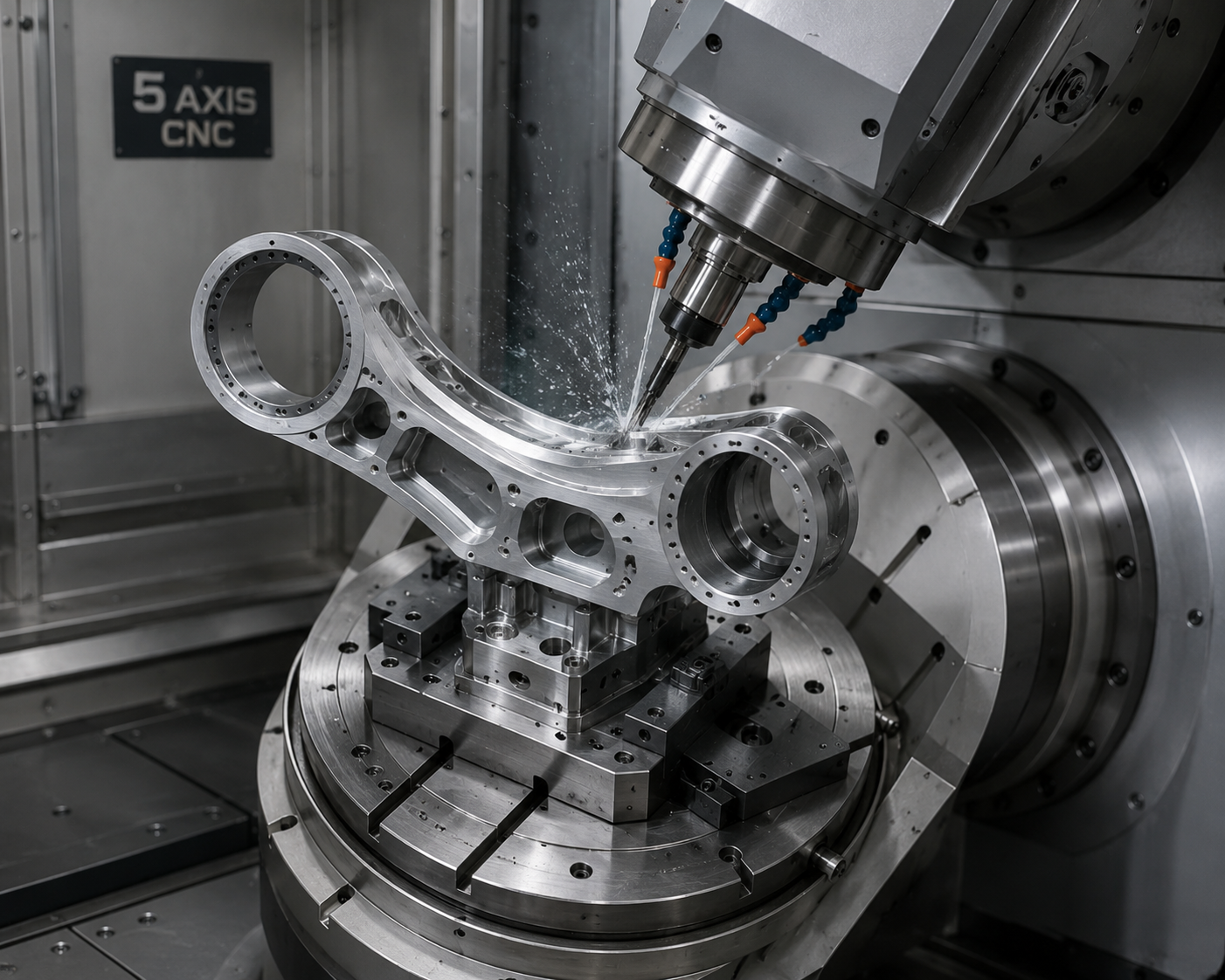
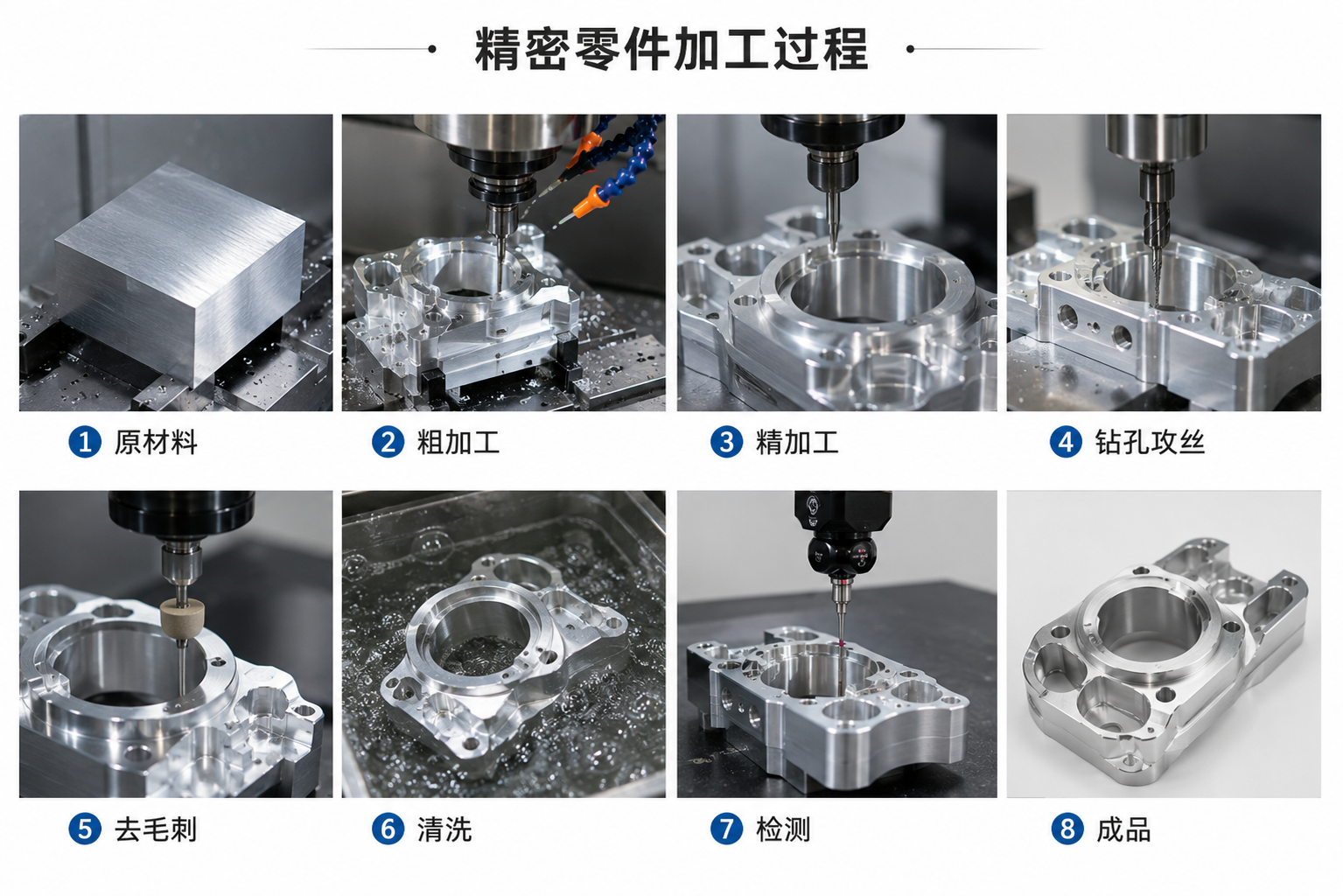
多自由度关节壳体通常需要5—7个面的精密加工,各面之间的位置关系要求严格——多个传动链的轴线相对位置精度直接影响关节的运动耦合误差。这类零件普遍需要五轴加工,三轴翻面的误差积累难以满足要求。
此外,人形机器人为了外观仿生,壳体往往有曲面、复杂内腔,五轴复杂曲面编程难度远高于工业机器人的规则壳体。
▌ 二、驱动方式的差异——线驱动带来的新零件类型
工业机器人的驱动:
以电机直驱或电机+减速机为主,传动路径短且直接,对应的精密零件类型相对标准化(减速机配合件、法兰、安装板)。
人形机器人大量采用线驱动:
为了减轻末端重量(手部、前臂),人形机器人广泛使用线驱动(腱传动)——电机放在近端(大臂、躯干),通过钢丝绳或腱绳传递力到远端(手指、腕关节)。
线驱动带来的新零件类型:
导线轮(Pulley)和导管(Conduit):
钢丝绳改变方向的导向轮,以及保护和导向绳索的管路。这类零件的关键精度是导轮的槽深和槽宽(决定绳索不脱槽),以及多个导轮轴孔的位置度(决定绳索走向的一致性)。尺寸小(φ8—20mm),精度要求IT7,加工不难但需要精细。
张紧机构零件:
控制线驱动张力的调节机构,通常需要精密的螺纹调节配合。螺纹精度和配合间隙决定了张紧控制的灵敏度和死区大小。
这类零件工业机器人几乎没有,工厂需要理解线驱动的工作原理才能正确理解图纸要求。

▌ 三、材料要求的差异——极致轻量化
工业机器人的材料选择:
工业机器人安装在地面或桁架上,重量不是首要约束——铸铁壳体、合金钢传动件、厚实的法兰,只要强度够、精度达标就行。
人形机器人的轻量化压力:
人形机器人需要直立行走、快速运动,末端(手部、前臂)的重量直接影响整机的动态性能——惯量大了,电机扭矩要求高,耗电量增加,续航缩短。极限轻量化是人形机器人结构设计的核心约束之一。
具体表现在材料选择上:
铝合金7075无处不在:
大量结构件用7075-T6(比强度204),部分场合用2024-T3(疲劳性能更好);6061在人形机器人里用得相对少,强度不够。
钛合金TC4大量出现:
末端执行器骨架、仿生手骨架——这些位置对重量最敏感,钛合金比强度214(和7075相当),但强度更高,适合做得更细长。国内外主流人形机器人的手部骨架,TC4使用比例远高于工业机器人。
PEEK和碳纤维增强塑料:
关节内部的绝缘件、轻量化填充件用PEEK或CFRP,这在工业机器人里很少见。
加工影响:
钛合金加工工时是铝合金的8—12倍,工厂需要有TC4的实际加工经验(专用刀具、高压内冷、保守切削参数),不能用铝合金参数硬套。PEEK需要压缩空气冷却、粗精分离、烘干处理,普通塑料件工厂不了解这些要求。
▌ 四、灵巧手——人形机器人最有挑战性的精密零件集合
工业机器人的末端执行器:
工业机器人末端通常是功能单一的工具(焊枪、夹爪、吸盘),结构简单,精度集中在安装法兰面和工具工作面。
人形机器人灵巧手的特殊性:
人形机器人手部需要多指、多关节(每只手12—20个自由度),手指骨架是精密零件中形状最复杂、尺寸最小、加工难度最高的零件集合之一。
灵巧手骨架的加工挑战:
尺寸极小:
手指近节骨长约30—50mm,宽度6—12mm,壁厚最薄处1—2mm——这个尺寸范围内,薄壁变形控制、刀具选择(小直径立铣刀)、装夹方案都需要专门设计。
多关节铰链孔的同轴度:
每个手指关节的铰链孔(φ2—4mm,多处),相互之间的同轴度和位置度决定了手指弯曲的平顺性。多个小孔在薄壁结构上加工,同轴度控制难度高。
钛合金材质+极小尺寸的组合:
钛合金切削速度慢,小直径刀具(φ0.5—2mm)排量扭矩极小,容易折刀,钛合金小尺寸精密件是整个机器人零件里加工难度最高的类别之一。
表面要求:
手指关节面需要低粗糙度(Ra0.4—0.8)减少运动阻力,有些需要硬质阳极氧化提升耐磨性(铝合金骨架)。
▌ 加工能力要求的对比
维度 工业机器人零件 人形机器人零件
关节壳体形状 规则,1—2个传动链 复杂,多自由度多传动链交叉
驱动零件类型 减速机配合件为主 线驱动导轮、张紧机构(新类型)
主要材料 铝合金/不锈钢为主 7075/TC4/PEEK,轻量化优先
末端执行器 工具类,结构简单 灵巧手骨架,极小极复杂
加工难点 多面位置精度 小尺寸+薄壁+钛合金+多关节孔
加工设备需求 五轴CNC为核心 五轴CNC+小径刀精加工能力
▌ 供应商选择建议
工业机器人零件的供应商,做人形机器人零件能做什么:
关节壳体(常规复杂度):可以做,工艺逻辑相通
减速机配合件:可以做,和工业机器人基本一致
线驱动导轮/张紧机构:可以做,理解图纸意图后没有特殊难度
需要额外确认的能力:
钛合金TC4小尺寸零件(手指骨架):问有没有φ1mm以下刀具的加工经验
PEEK绝缘件:问有没有PEEK专项工艺(不用乳化液、烘干、粗精分离)
灵巧手极小尺寸复杂件:问最小能做的壁厚和最小刀具直径
苏州加非猫精密制造技术有限公司(莱图加)承接人形机器人精密零件小批量打样——仿生关节壳体、线驱动机构、灵巧手骨架,铝合金7075、钛合金TC4、PEEK全材料,五轴CNC+精密车削+内圆磨全工艺自有,无起订量限制,精度±0.01m,当天审图报价,ISO9001:2015认证。
 (扫一扫添加与我们联系)
(扫一扫添加与我们联系)
钱工 +86 18851645656